
 This research, titled “A System for Automated Agricultural Spraying and a Method Thereof,” focuses on developing a coordinated multi-UAV framework for precision agricultural spraying. Led by Dr Awadhesh Dixit and his faculty team, Dr Ramesh Kumar, and Dr Bhaskara Santosh Egala, Assistant Professors at the Department of Computer Science and Engineering, this innovative research enhances efficiency in crop management by utilising advanced technologies for real-time data integration and optimisation.
This research, titled “A System for Automated Agricultural Spraying and a Method Thereof,” focuses on developing a coordinated multi-UAV framework for precision agricultural spraying. Led by Dr Awadhesh Dixit and his faculty team, Dr Ramesh Kumar, and Dr Bhaskara Santosh Egala, Assistant Professors at the Department of Computer Science and Engineering, this innovative research enhances efficiency in crop management by utilising advanced technologies for real-time data integration and optimisation.
Abstract
This invention presents a novel system and process for precision agricultural spraying using a coordinated multi-UAV (Unmanned Aerial Vehicle) framework. The system integrates multiple UAVs equipped with sensors (e.g., LiDAR, ultrasonic) and spraying mechanisms, managed by a central control unit employing hybrid approach combining PSO, Fuzzy Logic, and Reinforcement Learning (RL) for efficient real-time multi-UAV coordination. The hybrid system dynamically adapts to environmental conditions, ensuring optimal path planning, collision avoidance, and spray adjustments. The process involves real-time data collection on crop density, environmental conditions, and obstacles, enabling dynamic flight path planning and adaptive spray rate adjustments. Key innovations include the use of advanced control software for UAV coordination, obstacle avoidance, and uniform pesticide application, combined with hardware featuring adjustable spraying devices. This approach enhances efficiency, reduces collision risks, and ensures precise coverage in complex agricultural environments, distinguishing it from prior UAV-based spraying systems through its sophisticated integration of real-time optimization and multi-UAV collaboration.
Explanation in layperson’s terms
Imagine a team of small flying robots (drones) working together to spray crops on a farm. First, they use their cameras and sensors to check the fields, figure out where the bugs or weeds are, and spot anything in the way, like trees or fences. Then, they plan the best paths to fly so they don’t crash and can cover everything evenly. Each drone has a sprayer that can change how much it sprays depending on what the crops need—like giving extra spray where there are more bugs. A smart computer program helps them talk to each other and decide what to do as they go. This makes farming easier, faster, and wastes less spray compared to older ways.
We have created a way to use drones to spray crops with bug-killing chemicals more smartly. One drone checks the fields first to spot where the bugs are worst. Then, other drones with special sprayers fly over and target those spots, spraying two rows at once to save time. If they find a really buggy area, they hover there longer to make sure it’s fully covered. The drones communicate and coordinate to each other and dodge trees or other obstacles, so farmers don’t have to do it all by hand.
The hybrid system operates by continuously integrating PSO, Fuzzy Logic, and RL during UAV operations to achieve optimal coordination and performance. First, one part of the system—think of it like a master planner—figures out the best paths for the drones to fly based on what the farm looks like, like where the crops are and what’s in their way. Then, another part acts like a quick fixer—it tweaks those paths on the fly if something unexpected pops up, like thicker crops or a tree the drones didn’t see at first. It also adjusts how much spray the drones use so they don’t overdo it. Finally, there’s a learning part that helps the drones get better over time—like they remember what worked before and adapt to changes, such as growing plants or windy days. Together, this makes the drones super-efficient: they don’t bump into each other, they spray just the right amount, and they keep figuring out the best way to handle whatever the farm throws at them—all on their own.
Practical Implementation of the Research
A. Test Environment and UAVs
Field Setup:
Location: A 100-acre test field with varying crop densities (rice, wheat, and maize) and obstacles such as trees, irrigation systems, and terrain elevations.
Environmental Conditions: Tested under different weather conditions (sunny, windy, and overcast).
UAV Model:
Five multi-rotor UAVs equipped with spraying equipment, GPS, LIDAR sensors for obstacle detection, and onboard processing units to run the hybrid optimization algorithms.
Battery Life: 30-minute flight time with a 5kg payload capacity.
Communication: UAVs communicate via a wireless mesh network with a ground control system for real-time adjustments.
Each drone would also have a dual-spray setup—two adjustable nozzles attached to a tank holding pesticide or fertilizer, capable of spraying two rows of crops at once.
B. Hybrid Optimisation Algorithm
PSO for Path Planning:
Determines the optimal flight path based on crop density, UAV location, and environmental data.
Fuzzy Logic for Spray Adjustment:
Dynamically adjusts the spray level based on crop health data, wind speed, and UAV altitude.
Reinforcement Learning for Collision Avoidance:
UAVs learn from previous flight paths and environmental feedback to avoid collisions with other UAVs and obstacles.
Future Research Plans
Their future research focuses on developing swarm-based D2X communication and coordination, task rescheduling, localization, and optimized path planning to enhance UAV network performance, prevent collisions, and advance AI-related applications.
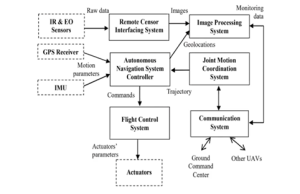
Figure 1: Block diagram of Multi-UAV Coordination path planning and coordination among multiple UAVs in an agricultural field.

Figure 2: Diagram illustrating drone spraying in agriculture field with obstacle avoidance