
Simulating time-variant channel impulse response for mmWave I2I channels using Doppler spread information
 Dr Anirban Ghosh
Dr Anirban Ghosh
Dr Anirban Ghosh, Assistant Professor, Electronics and Communication Engineering, has recently published a paper titled “Time Variance of 60 GHz VI2I channel”. The paper is published in the renowned journal Elsevier-Vehicular Communication with an Impact Factor of 4.7. This paper explores the implementation challenges in unlicensed 60 GHz frequency band for autonomous vehicle infrastructure. This work has been implemented in collaboration with his colleagues from NIT Durgapur and collaborators from Brno University under the aegis of Prof. Ales Prokes. This work is also funded by the Science Foundation grant (Czech) and National Sustainability Program grant (Czech) and DST-Core Research Grant(India).
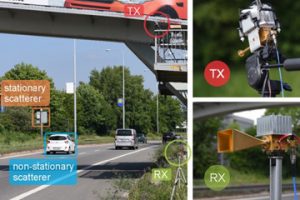 Fig 1: Field test setup at the measurement site
Fig 1: Field test setup at the measurement site
Smart cities are cities on the move; having a mission of delivering people and goods with zero congestion, zero fatality and zero energy wastage. For realising this mission, a smart city needs an intelligent transport system (ITS). As far as the communication aspect of ITS is concerned, historically, the urban ITS planners were more concerned about vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) modes of communication. This is because the V2V and V2I channels are essentially wireless, and establishing reliable low-latency links over these channels is challenging. Infrastructure-to-infrastructure (I2I) communication is also an integral part of the ITS initiative, and due to their rapid, dynamic and non-invasive nature of the installation, wireless I2I links are preferred over wired links in several smart-road based ITS applications. In order to implement wireless I2I communication, transceivers may be fitted with different kinds of roadside units (RSUs), e.g., short height traffic signposts, overhead gantries, and cantilever sign supports. The traditional role of these RSUs is to support the basic ITS goals, i.e. driver assistance or traffic management. As the vehicular networks scale-up, ITS computations are being shifted to the edge, and the RSUs are going to play more prominent roles in the form of edge computing devices. For example, RSUs can form the cloudlet layer of a vehicular fog computing (VFC) architecture for the internet of vehicles (IoV).
Vehicular wireless I2I channels realise fixed-to-fixed (F2F) radio communication between two RSUs. For any F2F radio channel with stationary transmitter (TX) and receiver (RX), the time-variance is caused by the mobility of the scatterers. These mobile scatterers, say passersby for an indoor scenario, or passing vehicles for an outdoor scenario, cause changes in path lengths in a fading multipath channel. When viewed in frequency-domain, this yields a change in carrier frequency termed as Doppler shift which is proportional to the velocity of the scatterer, and the spectral broadening caused by the time rate of change of the channel is measured with the Doppler spread. Information about Doppler spread is critical for V2V applications such as platooning. In the context of V2I applications, accurate estimation of the Doppler spread is required for designing adaptive transceivers, smart antennas and for determining cellular handoffs. Doppler spread information can also be used for I2I applications like speed estimation. The radar-based solution has a lower latency compared to a camera-based solution, owing to the video acquisition and processing time of the later. As the Doppler shift is a linear function of the carrier frequency, it is of greater concern while moving up in the frequency ladder to the millimetre wave (mmWave) regime. The Doppler spread in the unlicensed 60 GHz mmWave band would be 10-30 times that in the current sub-6 GHz band, with a range spanning from 10 Hz to 20 kHz depending on the velocity of the scatterers. Moreover, compared to V2V links, the effect of moving scatterers is much more pronounced in F2F links; walking pedestrians with a velocity order of ∼ 1 m/s or even the tree leaves fluttering in the wind are important for F2F channel modelling. For highways, the moving vehicles have a velocity an order higher (> 10 m/s) and contribute significantly to the time-variance of the roadside wireless I2I links.
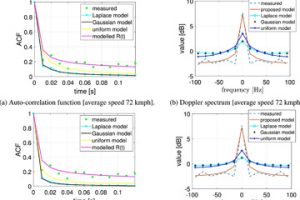 Fig 2: Comparison of the measured and
Fig 2: Comparison of the measured and
proposed models of ACF and Doppler
Spectrum with existing analytical models
In this paper, Dr Ghosh studied the time-variance of a roadside infrastructure to infrastructure (I2I) channel operating at 60 GHz millimetre wave (mmWave) band, where the time-variance is caused by moving vehicles acting as scatterers. At first, measurement data is obtained by placing the transmitter (TX) and the receiver (RX) at different heights to emulate a link between two nonidentical roadside units (RSUs), and time-domain channel sounding is performed by sending complementary Golay sequences from the TX to the RX. A linear piecewise interpolation of the corresponding temporal auto-correlation function (ACF) is used to find the Doppler spread of the I2I channel, where their interpolation method compensates for a slower sampling rate. Next, a framework is presented for the time-variant channel impulse response (CIR) simulation, which focuses on moving scatterers only and validates the linear piecewise ACF model. The framework is useful for time-variant vehicular I2I channel simulation and in speed estimation related vehicular applications. Finally, a double-slope curve-fitted analytical model for ACF is proposed as a generalisation to the linear piecewise model. The proposed model and its Doppler spectrum are found to be in agreement with the analytical results for fixed-to-fixed (F2F) channels with moving scatterers and matches perfectly with the measured data. “Our research has explained a framework for simulating time-variant channel impulse response (CIR) for mmWave I2I channels with moving scatterers using Doppler spread information – which provides means to study the various characteristics of an I2I channel even without carrying out any expensive channel sounding campaign”, said Dr Ghosh.
Dr Ghosh and his collaborators are currently exploring further challenges in communication between vehicles (V2V) in the same frequency range (60 GHz).
To know more about the paper, please visit- https://www.sciencedirect.com/science/article/abs/pii/S2214209620300590?dgcid=coauthor